本日の科学ライブショー「ユニバース」は、亀谷和久(東京理科大学)が
案内役を務め、ゲストに程島竜一さん(埼玉大学)をお招きしてお送りしました。
今回のユニバースは科学技術館前の全天画像から始まりました。
早いものでもう12月。20時頃の空には西に秋の星座が、東には冬の星座が
輝いています。
さらに12月14日には「ふたご座流星群」がピークを迎えます。
今年は月明かりの影響も無く、晴れていれば多くの流星を
見ることができるチャンス!寒さに気をつけてぜひ夜空を見上げてみて下さい。
続いて、アメリカのシカゴにあるヤーキス天文台のビビアンさんと中継を
つないで「ライブ天体観測」を行いました。しかし本日のシカゴはあいにくの曇り。
そこで、ビビアンさんが昨日撮った木星やM51をはじめとした様々な天体画像を
英語で解説していただきました。
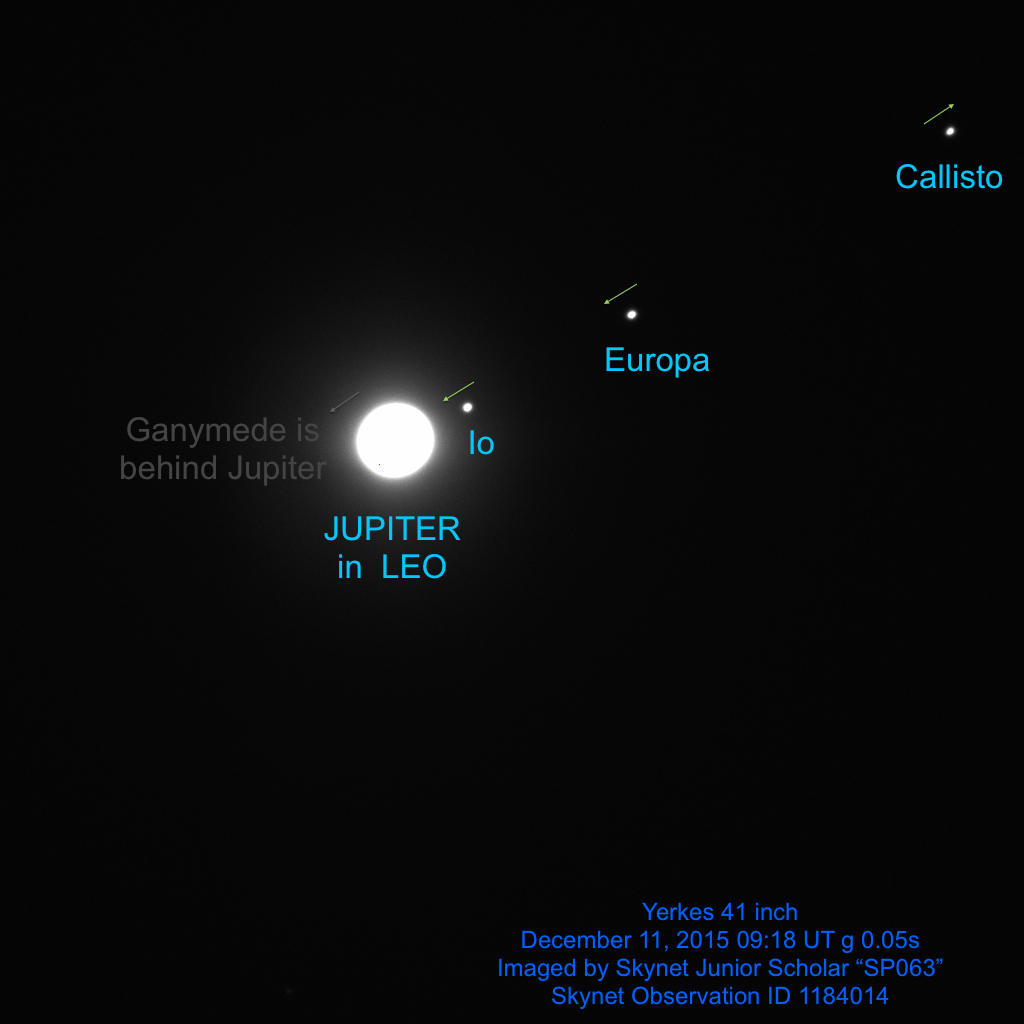
図:木星
その後は地球を飛び出し、宇宙の果てへ。
宇宙旅行から帰ってきたところで本日の「ゲストコーナー」。
ゲストの程島さんには「歩行ロボット技術による難所作業の高度化」
というタイトルでお話しいただきました。
今回紹介していただいたロボットは、法面工事用の4足歩行ロボット、
そして調査用の6足歩行ロボットです。
法面(のりめん)とはコンクリートのフレームなどで人工的に補強した
斜面のことです。これまでの法面作業は人力やクレーンによって行われていました。
しかし、これでは時間がかかるうえに作業をしている人間はたいへん危険な状態に
さらされてしまいます。そのため、長い間作業の自動化が望まれていました。
そこで考案されたのが4足歩行ロボット。このロボットは指示したとおりの
道筋をフレームを避けながら動くことができるので、フレームを壊してしまう
心配もありません。
さらに法面を作成するには、急な坂を動かなければならない事前調査も
重要となります。
ここで活躍するのが小さくて軽い6足歩行ロボット。
このロボットはザトウグモという生物を参考に作られて、小さい体を
長い足で動かせるように設計されているのだそうです。
今回は作業者の負担を減らすために開発されたロボットを紹介して
いただきましたが、程島さんは他にも恐竜型やトカゲ型のロボット
など様々なロボットの研究を行っているとのこと。
どんどん進化するロボット技術から目が離せません!
科学ライブショー「ユニバース」では、毎週楽しい科学の話題を用意して
皆様をお待ちしております。ぜひ、土曜日は「ユニバース」へお越しください。